È il primo robot-serpente del tutto flessibile e promette di riuscire a risolvere decine di problemi, dall’ambito medico ai viaggi spaziali. Quello sviluppato nei laboratori della Scuola Sant’Anna è infatti il primo brevetto al mondo di un robot a tal punto flessibile: le due strutture “intrecciate” che lo costituiscono gli permettono di allungarsi e curvarsi evitando con precisione ogni ostacolo. Per questo il robot può essere utilizzato, come accennato, in medicina – per raggiungere un bersaglio preciso nel corpo umano –, o nello spazio – per riparare satelliti o strutture altrimenti inaccessibili. Descritto sulla rivista Plos One, il robot è stato ottenuto dalla ricerca coordinata da Edoardo Sinibaldi, dell’Istituto Italiano di Tecnologia (Iit) di Genova, e condotta in collaborazione con la Scuola Superiore Sant’Anna di Pisa.
La particolarità unica di questo robot è quella di riuscire a costruire da solo la sua ‘guida’, semplicemente avanzando. “Nessun’altro strumento – ha detto il professor Sinibaldi – è in grado di costruire una traiettoria simile. È un risultato nato da argomentazioni relative alla simmetria: partendo da un problema matematico abbiamo costruito un oggetto fisico”.
[it_gallery]
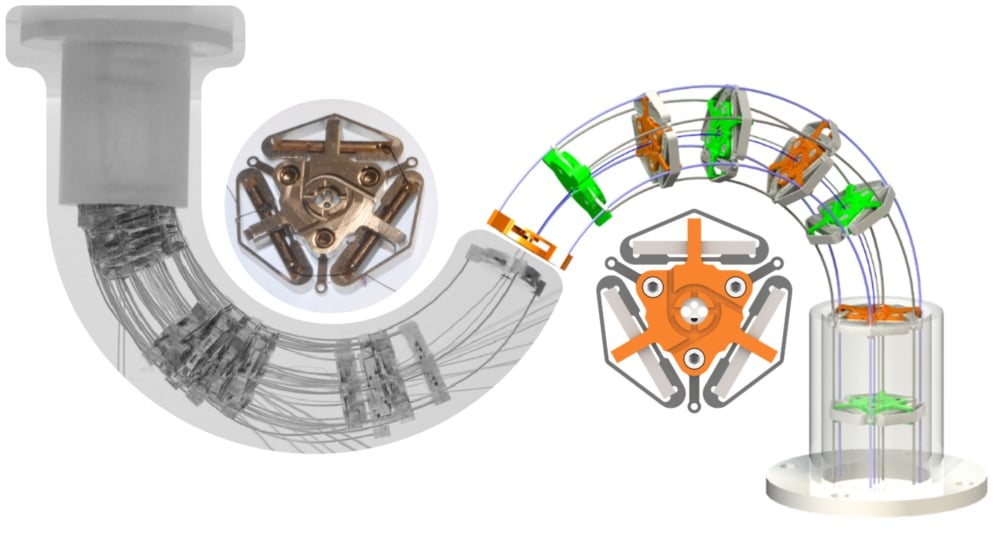
Il robot, i cui primi modelli progettati per particolari applicazioni potrebbero arrivare sul mercato nei prossimi 3-5 anni, è stato messo a punto presso il centro di Micro-BioRobotica di Pontedera (Pisa). È costituito da due strumenti flessibili identici e “intrecciati”, che avanzano uno sull’altro supportandosi a vicenda, in modo alternato. Questo è possibile perché ciascuna delle due parti può diventare temporaneamente rigida, facendo da guida e supporto all’altra: quella che avanza in avanscoperta deve essere flessibile, mentre quella che resta indietro si irrigidisce. A rendere più o meno rigide le due strutture, a seconda della necessità, è una coppia di fili elettrici che portano corrente a piccoli blocchi di materiale piezoelettrico che scorrono all’interno della struttura e che si dilatano quando vengono percorsi dall'elettricità.
In questo modo il “robot-serpente” può curvarsi a seconda della necessità: la sua priorità è muoversi e farsi strada in modo da evitare ogni ostacolo. Nello studio sono coinvolti anche il sudcoreano Byungjeon Kang e il macedone Risto Kojcev, entrambi studenti di dottorato della Scuola Superiore Sant’Anna di Pisa.